Apollon PGNCS - Apollo PGNCS - Wikipedia



Apollon asosiy qo'llanma, navigatsiya va boshqarish tizimi (PGNCS) (talaffuz qilinadi pings) o'zboshimchalik bilan edi inertial rahbarlik tizimi bu ruxsat berdi "Apollon" kosmik kemasi yoki kutilganidek, Yer bilan aloqa to'xtatilganda yoki kosmik kemaning Oy orqasida bo'lganida yoki aloqa uzilib qolganida o'z vazifalarini bajarish. Apollon buyruq moduli (CM) va oy moduli (LM), ularning har biri PGNCS versiyasi bilan jihozlangan. PGNCS, xususan, uning kompyuteri, shuningdek, LM-dan barcha tizim kirishlari uchun buyruq markazi edi hizalama optik teleskop, radar tizimi, qo'llanma tarjima va aylanish astronavtlar tomonidan kiritilgan qurilmalar, shuningdek LM tizimlaridan boshqa ma'lumotlar.
PGNCS tomonidan ishlab chiqilgan MIT asbobsozlik laboratoriyasi rahbarligida Charlz Stark Draper (keyinchalik asboblar laboratoriyasi uning nomi bilan atalgan). PGNCS kompaniyasining bosh pudratchisi va inertsional o'lchov birligi (O'IH) edi General Motors kompaniyasining Delco bo'limi. PGNCS quyidagi tarkibiy qismlardan iborat edi:
- inertsional o'lchov birligi (IMU)
- The Apollon rahbarlik qiladigan kompyuter (AGC)
- inertial platforma burchaklarini servo boshqarish uchun foydalaniladigan signallarga aylantirish uchun rezolyutsiyalar
- optik birliklar, biri CM uchun, boshqasi LM uchun
- optik moslamalarni va LMda uchrashuv radarini O'IHga qattiq bog'lash uchun navigatsiya bazasi (yoki navbase) deb nomlangan mexanik ramka
- AGC dasturi
Versiyalar

CM va LM bir xil kompyuterdan, inersial platformadan va rezolyutsiyalardan foydalangan. Asosiy farq optik birlik edi. Navbase har bir kosmik kemada ham turlicha bo'lib, turli xil o'rnatish geometriyalarini aks ettirdi. LM uchrashuvi radar shuningdek, uning navbase-ga ulangan edi.
CM ning ikki avlodiga mos keladigan ikkita PGNCS versiyasi - I blok va II blok mavjud edi. Keyin Apollon I I CM blokida sodir bo'lgan yong'in, NASA Ekipajning boshqa missiyalari Block I-dan foydalanmaslikka qaror qildi, ammo unchalik aniq bo'lmagan vazifalar. Blok I va Block II PGNCS o'rtasidagi asosiy farqlar almashtirishni o'z ichiga oladi elektromexanik rezolyutatorlar barcha elektron dizayni bilan va ishlab chiqarilgan Block I navbase o'rnini bosadi berilyum, o'rnatilgan ramka bilan alyuminiy quvur bilan to'ldirilgan poliuretan ko'pik. Block II navbase engilroq, arzonroq va xuddi shunday qattiq edi.
Blok I va II blok o'rtasidagi yana bir muhim farq bu ta'mirlanuvchanlik edi. Apollon dasturining asl maqsadi kosmonavtlarning elektronikani ta'mirlashni amalga oshirishi edi. Shunga ko'ra, Block 1 PNGCS ko'plab bir xil modullar bilan ishlab chiqilgan bo'lib, ularni parvoz paytida, agar kerak bo'lsa, ehtiyot qismlar bilan almashtirish mumkin edi. Ammo ekipaj bo'linmalari ichidagi yuqori namlik darajasi va tana suyuqligi bilan ishlashdagi baxtsiz hodisalar Egizaklar 7 Vazifa muhrlanmagan elektr ulanishlarini istalmagan holga keltirdi. Ta'mirlash imkoniyati II blokda yo'q qilindi va barcha birliklar va elektr aloqalari muhrlandi.[1] Halokatli Apollon 1 yong'ini ushbu tashvishni kuchaytirdi.
PGNCS komponentlari Draper tomonidan AQSh dengiz kuchlari uchun ishlatilgan suv osti qutqarish vositasi (DSRV).[2]
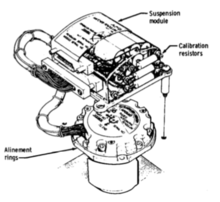
Inersial o'lchov birligi

O'IH uch eksa ustida gimbaled qilingan. Ichki qismi, barqaror a'zosi (SM), 6 dyuymli berilyum kub edi, uchtasi giroskoplar va uchta akselerometrlar unga o'rnatilgan. Fikrlash tsikllari dvigatellarni har bir o'qda boshqarish uchun rezolyutsionerlar yordamida gyroskoplardan signallardan foydalangan. Bu servo tizim barqaror a'zoni nisbatan barqaror ushlab turdi inersiya maydoni. Keyin akselerometrlarning signallari kosmik kemaning tezligi va holatini kuzatib borish uchun birlashtirildi. O'IH Draper tomonidan ishlab chiqilgan qo'llanma tizimidan kelib chiqqan Polaris raketasi.
Inertial qo'llanma tizimlari mukammal emas va Apollon tizimi bittaga yaqinlashdi millirad soatiga. Shunday qilib, vaqti-vaqti bilan yulduzlarni ko'rish orqali inertial platformani qayta tuzish kerak edi.
Optik birliklar


CM optik birligi aniqlikka ega edi sekstant (SXT) O'IH ramkasiga o'rnatildi, u yulduzlar va Yer yoki Oy nishonlari yoki ufq orasidagi burchaklarni o'lchashi mumkin edi. Uning ikki marta ko'rish qobiliyati, 28X kattalashtirish va 1.8º ko'rish maydoni mavjud edi. Optik birlik, shuningdek, yulduzlarni ko'rish uchun skanerlash teleskopini (SCT) kam kattalashtiradigan keng ko'lamini (60 included) o'z ichiga olgan. Optik birlik kosmosdagi CM holatini va yo'nalishini aniqlash uchun ishlatilishi mumkin.

Buning o'rniga LM an hizalama optik teleskopi (AOT), asosan periskop. AOT tashqi elementi Oy osmonining katta qismini qoplash uchun LM ga nisbatan oltita sobit pozitsiyalardan biriga aylantirilishi mumkin bo'lgan quyoshdan himoyalangan prizma edi. Har bir pozitsiyaning 60º ko'rish maydoni mavjud edi. Qaytganida AOT pozitsiyasi AGC tomonidan o'qilishi mumkin edi; retikulani ikki xil yulduzga qaratib, kompyuter hunarmandning yo'nalishini aniqlay oladi.[3]
Quyosh soyasi dasturning oxirida, 1967 yilda, sinovlar va modellashtirishdan so'ng, astronavtlar oy yuzasida yulduzlarni to'g'ridan-to'g'ri quyosh nuri yoki LM yaqinidagi qismlar tomonidan tarqaladigan yorug'lik tufayli ko'rishlari mumkin emasligini aniqladilar. tashqi prizma. Quyosh soyasini qo'shish, shuningdek, ko'rish joylari sonini uchdan oltitagacha oshirishga imkon berdi.[1]:p. 41 ff

Dasturiy ta'minot
Bortda qo'llaniladigan dastur a Kalman filtri kosmik kemaning maqbul holatini baholash uchun yangi ma'lumotlarni o'tgan pozitsiyani o'lchash bilan birlashtirish. Asosiy ma'lumotlar a edi koordinatali transformatsiya O'IHning barqaror a'zosi va mos yozuvlar koordinatalari tizimi o'rtasida. Apollon dasturining argotipida ushbu matritsa quyidagicha tanilgan edi REFSMMAT ("Barqaror a'zo matritsasiga havola" uchun). Missiya bosqichiga qarab, biri Yerda va biri Oyda joylashgan ikkita mos yozuvlar koordinatalari tizimi ishlatilgan.
O'zining nomidagi "asosiy" so'ziga qaramay, PGNCS ma'lumotlari navigatsiya ma'lumotlarining asosiy manbai emas edi. NASA ma'lumotlarini kuzatib borish Deep Space Network yordamida Mission Control-dagi kompyuterlar tomonidan qayta ishlangan eng kichik kvadratchalar algoritmlar. Olingan pozitsiya va tezlikni taxminlari PGNCS tomonidan ishlab chiqarilganlarga qaraganda aniqroq edi. Natijada astronavtlarga vaqti-vaqti bilan yerdagi ma'lumotlarga asoslanib AGCga kirish uchun davlat vektorlari yangilanib turardi. PGNCS kosmik qurilmalarning yo'nalishini saqlab qolish, manevr paytida kuyish paytida raketalarni boshqarish, shu jumladan Oyga qo'nish va uchish hamda kommunikatsiyalarning rejalashtirilgan va kutilmagan uzilishlarida navigatsiya ma'lumotlarining asosiy manbai sifatida hali ham muhim edi. PGNCS shuningdek, erdagi ma'lumotlarni tekshirishni ta'minladi.
Oy modulida uchinchi navigatsiya vositasi bo'lgan abort qilish bo'yicha ko'rsatma tizimi (AGS), tomonidan qurilgan TRW. Bu PGNCS ishlamay qolganda ishlatilishi kerak edi. AGS Oydan uchish uchun va qo'mondonlik moduli bilan uchrashish uchun ishlatilishi mumkin, ammo qo'nish uchun emas. Davomida Apollon 13, Oy yaqinidagi eng muhim kuyishdan keyin AGS PGNCS o'rniga ishlatilgan, chunki u kamroq elektr quvvati va sovutish suvini talab qilgan.
Apollon 11
Davomida Apollon 11 missiya, ikkita PGNCS signalizatsiyasi (1201 "VAC maydonlari mavjud emas" va 1202 "Ijro etuvchi signalizatsiyasi, yadro to'plamlari yo'q") 1969 yil 20 iyulda Oyga birinchi qo'nishga urinish paytida missiyani boshqarish uchun o'tkazildi. Kompyuter tizimining haddan tashqari yuklanishiga sabab bo'ldi bir vaqtning o'zida qo'nish radar ma'lumotlari va uchrashuv radar ma'lumotlarini olish. Missiyani boshqarish bo'yicha qo'llab-quvvatlash xodimlari signalizatsiya xavfsiz tarzda e'tiborsiz qoldirilishi mumkin degan xulosaga kelishdi va qo'nish muvaffaqiyatli bo'ldi.[4][5]
Shuningdek qarang
- Saturn V asboblar birligi - "Apollon" raketa-tashuvchisi tomonidan qo'llaniladigan tizim
Adabiyotlar
- ^ a b Xolli, M. D. (1976 yil may). "Apollon tajribasi haqida hisobot - qo'llanma va boshqaruv tizimlari: asosiy qo'llanma navigatsiya va boshqaruv tizimini ishlab chiqish, NASA TN D-8287" (PDF). Lyndon B. Jonson kosmik markazi, Amerika Qo'shma Shtatlari. Milliy aviatsiya va kosmik ma'muriyat.
- ^ Tovushsiz urush: Dengiz ostidagi sovuq urush, Jon Pina Kreyven, Simon va Shuster, 2002, s.120
- ^ Apollon Oy modulini tekislash optik teleskopi, Apollon Lunar Surface Journal
- ^ Eyles, Don (2004-02-06), Oy moduli bo'yicha qo'llanma kompyuteridan ertaklar, olingan 2017-10-01
- ^ "Apollon 11 Lunar Surface Journal: dastur signallari". www.hq.nasa.gov. Olingan 2017-04-16.
| Avtotransport vositalarini ishga tushiring |  | |
|---|---|---|
| Avtotransport vositasini ishga tushiring komponentlar | ||
| Kosmik kemalar | ||
| Kosmik kemalar komponentlar | ||
| Kosmik kostyumlar | ||
| Oy yuzasi uskunalar | ||
| Zaminni qo'llab-quvvatlash | ||
| Tantanali | ||
| Bog'liq | ||